
Plus MCML

-
TOYOPUC-Up to 2 modules can be mounted on TOYOPUC-Plus
Achieves motion control for up to 16 axes with TOYOPUC-Plus.
-
Optimal for multi-axis transfer and positioning
Optimal for multi-axis positioning control, from small to large equipment.
Simplified teaching makes configuration easy even when there is a high volume of positioning information -
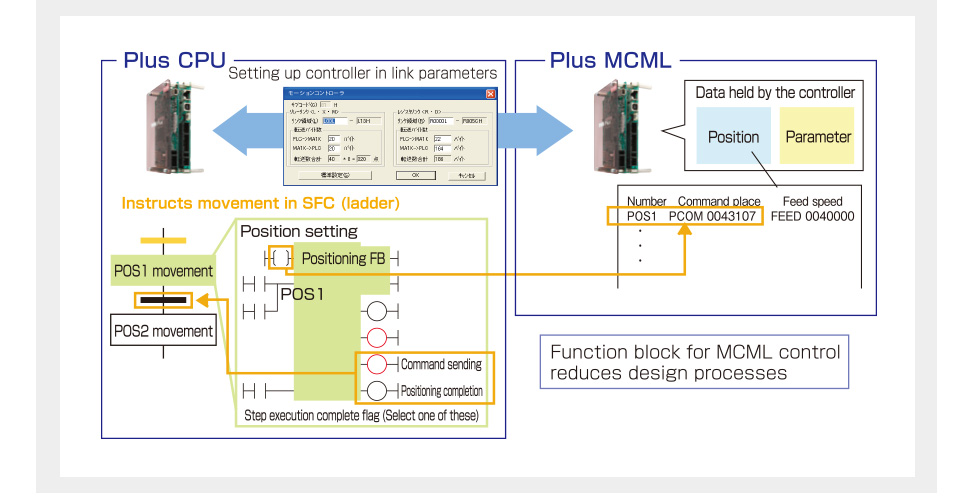
Achieves motion control using ladder circuits alone
Being able to control with SFC and FBD makes design easy.
-
Easy motor monitoring
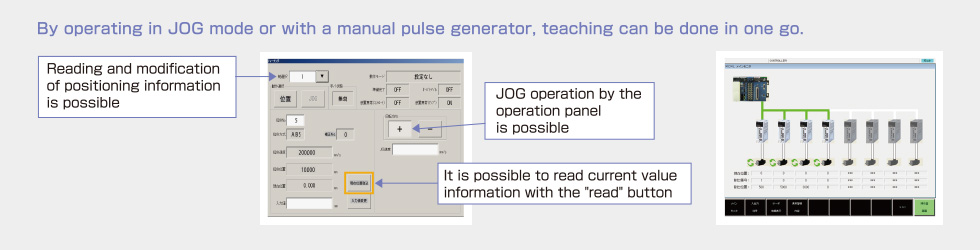
Teaching of target position setting is also easily carried out on the operation panel screen.
1. Features of Plus-MCML
Realizes motion control only using ladder circuits. In addition to this feature,
being able to control with SFC and FBD allows you to design more easily.
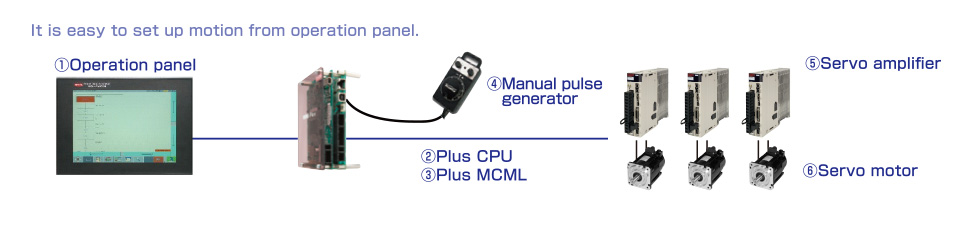
No personal computers are necessary for setting up systems. Easy setup from operation panel.
| Section | Type | Task |
| ①Operation panel | TOYOPUC-DM/FPseries | Realizes visualization of PLC and motion settings. |
| ②PLC | TOYOPUC-PLus | Configures sequence control of equipment. |
| ③Motion controller | TOYOPUC-Plus MCML(TCI-6819) | Controller for JTEKT motion system. |
| ④Manual pulse generator* | JHC1MCA-□□ | Manual operation box at hand for the positioning adjustment for each axis. |
| ⑤Servo amplifier | JSGDV-□□□□ | Servo amplifier for JTEKT motion system./td> |
| ⑥Servo motor |
JSGMJV type (middle moment small capacity) JSGMAV type (low moment small capacity) JSGMSV type(low moment medium capacity) JSGMPS type (middle moment small capacity) JSGMGV type (middle moment medium capacity) |
Servo motor for JTEKT motion system. |
JTEKT not only supplies and supports motion controllers as single unit but also as motion systems.
It is easy to monitor motors; teaching of target position setting is also easily carried out through operation panel screens.
2. Specifications of Plus-MCML
Plus MCML specifications
| Type | Functions | Content | |
| Plus MCML | No. of control axes | 1-8 axes | |
 |
Control mode | Positioning control | |
| Torque control | |||
| Speed control | |||
| Encoder method | Absolute type | ||
| Positioning control | Positioning method | PTP control (each axis independent movement) | |
| Interpolation control | Linear compensation none | ||
| Arc compensation none | |||
| No. of points | 700 points/axis, max. 5600 points (700x8 axes) | ||
| Position command |
Position command unit | mm, deg | |
| Command setting unit | Can be set up by parameters from decimal 0 to 5 digits | ||
| Linear axis position command range |
-2147483647 ~ 2147483647 | ||
| -214748364.7 ~ 214748364.7 | |||
| -21474836.47 ~ 21474836.47 | |||
| -2147483.647 ~ 2147483.647 | |||
| -214748.3647 ~ 214748.3647 | |||
| -21474.83647 ~ 21474.83647 | |||
| Speed command | Speed command unit | mm/s, deg/s | |
| Speed command range | 0 ~ 2091752000 | ||
| Acceleration/ deceleration |
Acceleration/ deceleration processing |
Trapezoid acceleration/deceleration (setting can be made per acceleration/deceleration. 2-step changeable) |
|
| Acceleration/deceleration setting range | 1 ~ 65535 | ||
| Setup data | Positioning control | Setting data (700 points/axis) | |
| Position output | position output data (16 points/axis) | ||
| Control mode | Parameter (for controller and servo amplifier) | ||
| Stroke | 65536 rotations | ||
| Communication | Method | MECHATROLINK-Ⅲ | |
| Speed | 100Mbps | ||
| Compensation function |
Index position compensation function | ||
| Others | Unlimited long rotation function(endless operation function) /Jog feed function/Current restraint function |
||
| Supported PLC | TOYOPUC-Plus CPU | ||
| Specifications | Applied motor | JTEKT arrangement type |
|
50W | JSGDV-R70A21B |
| 100W | JSGDV-R90A21B | |
| 200W | JSGDV-1R6A21B | |
| 400W | JSGDV-2R8A21B | |
| 500W | JSGDV-3R8A21A | |
| 750W | JSGDV-5R5A21A | |
| 1kW | JSGDV-7R6A21A | |
| 1.5kW | JSGDV-120A21A | |
| 2kW | JSGDV-180A21A | |
| 3kW | JSGDV-200A21A | |
| 5kW | JSGDV-330A21A | |
| 6kW | JSGDV-470A21A | |
| 7.5kW | JSGDV-550A21A | |
| 11kW | JSGDV-590A21A | |
| 15kW | JSGDV-780A21A |

- ※MECHATROLINK is the trade mark of MECHATROLINK Members Associations.